Det er ganske vanlig at mennesker - spesielt de som jobber med produksjon - knytter en knute, stripper foringsrøret av en kabel, setter inn en pinne i et hull eller bruker et håndverktøy som en bore. De kan virke som enkle oppgaver, men er egentlig veldig sammensatte og involverer ekstremt fine finger- og håndbevegelser.
Relatert innhold
- Hvordan roboter forlot labben og begynte å hjelpe mennesker
Selv om roboter blir mer og mer involvert i fabrikkarbeid og i en lang rekke andre typer jobber - inkludert i servicenæringen og helsevesenet, er fingerferdigheten ikke på langt nær like imponerende. Siden folk først brakte dem til å jobbe i bilfabrikker for mer enn 50 år siden, har vi bygget roboter som kan sveise, male og sette sammen deler ganske bra. Dagens beste robothender kan hente kjente gjenstander og flytte dem til andre steder - for eksempel å ta produkter fra lagerbinger og legge dem i esker.
Men roboter kan ikke orientere et håndverktøy ordentlig - si, fôre en Phillips-hode skrutrekker med sporene på en skrue, eller sikte en hammer mot en spiker. Og de kan definitivt ikke bruke to hender sammen på detaljerte måter, som å bytte ut batteriene i en fjernkontroll.
Menneskerhender er utmerkede til disse oppgavene og mye mer. For å til og med komme nær å konkurrere med det våre hender er lett i stand til, trenger robothender bedre smidighet, pålitelighet og styrke - og de må kunne føle mer nøyaktig og bevege seg enda mer fint enn de gjør nå, for å finne ut hva de ' holder igjen og hvordan du takler det best. For at roboter skal kunne jobbe sammen med mennesker, må vi finne ut hvordan vi lager roboter som bokstavelig talt kan gi oss en hånd når våre to ikke er nok.
Forskergruppen min ved Northeastern University jobber med å gjøre nettopp dette, spesielt for humanoide roboter som NASAs Valkyrie, som har tre fingre og en tommel på hver hånd. Hvert siffer har knokelignende ledd, og hver hånd har et håndledd som kan rotere lett. Vi jobber med å lage bevegelser - kombinasjoner av arm-, håndledds-, finger- og tommelbevegelser som samlet utfører en oppgave, som å flytte en skiftenøkkel i en sirkel for å stramme en bolt, eller dra en vogn fra et sted til et annet.
 Hver av disse industrirobotene har flere spesialiserte verktøy. Kan mange av oppgavene deres gjøres av robothender? (Steve Jurvetson / flickr, CC BY)
Hver av disse industrirobotene har flere spesialiserte verktøy. Kan mange av oppgavene deres gjøres av robothender? (Steve Jurvetson / flickr, CC BY) Betydningen av hender
I stedet for å gjøre hver robot til en tilpasset maskin som er skreddersydd for en veldig spesifikk oppgave, må vi utforme flerbruksroboter, eller til og med slike dyktige maskiner som de kan kalles “allmenne formål” - bra for nesten enhver oppgave. En nøkkel til suksessen for denne typen roboter vil være gode hender.
Arbeidet vårt fokuserer på å utforme en ny klasse av tilpasningsdyktige robothender som er i stand til presise fine bevegelser og autonome grep. Når roboter er i stand til å hamre i negler, skifte batterier og gjøre andre lignende bevegelser - grunnleggende for mennesker, men veldig komplekse for roboter - vil vi være på god vei til menneskelignende fingerferdighet i robothender.
Å oppnå dette målet innebærer også å oppfinne nye design som inneholder harde og myke elementer - måten menneskelig bein gir styrke til et grep, med huden som sprer trykket slik at et vinglass ikke knuses.
Raskere utvikling og testing
Moderne teknologiske forbedringer gjør utviklingsprosessen enklere. Med 3D-utskrift kan vi lage prototyper veldig raskt. Vi kan til og med lage engangskomponenter til en rimelig pris for å prøve forskjellige arrangementer av mekanismer, for eksempel to- eller trefingrede griper for enkle valg og oppgaver eller antropomorfe robothender for mer delikate operasjoner.
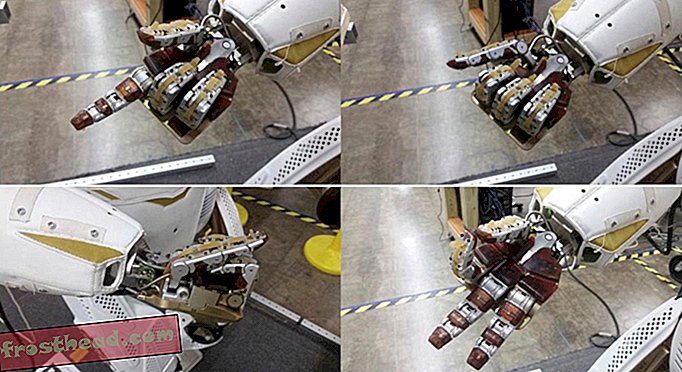 Ulike typer hender på en NASA Valkyrie-robot. (Northeastern University, CC BY-ND)
Ulike typer hender på en NASA Valkyrie-robot. (Northeastern University, CC BY-ND) Når elektroniske kameraer og sensorer blir mindre, kan vi integrere dem på nye måter. Hvis vi for eksempel legger trykksensorer og kameraer i en robothånd, kan de gi tilbakemelding til robotkontrolleren (enten den er menneskelig eller automatisert) når et grep er sikkert, eller hvis noe begynner å gli. En dag kan de kanskje føle hvilken retning det gliobjektet beveger seg, slik at roboten kan fange den.
Disse evnene er allerede andre natur for mennesker gjennom syn og propriosepsjon (evnen til å føle de relative stillingene til kroppsdeler uten å se eller tenke på det). Når vi først er i stand til å oppnå dem i roboter, vil de kunne gjøre ting som å oppdage om et grep er for sterkt og klemmer et objekt for hardt.
Planlegge koordinerte bevegelser
En annen milepæl vil være å utvikle metoder for roboter for å finne ut hvilke bevegelser de trenger å gjøre i sanntid, inkludert å føle hva som skjer i hendene deres i hvert øyeblikk. Hvis en robothånd kan oppdage endringer i gjenstander den håndterer, eller manipulere gjenstander mens du holder dem, kan de hjelpe med de vanlige manuelle oppgavene som knytebinding og trådstripping.
Å jobbe med to hender sammen er enda lenger inn i fremtiden, selv om det vil gi et betydelig løft, spesielt for produksjon. En robot som kan betjene et drill med to hender eller passere maskindeler fra den ene hånden til den andre, ville være store forbedringer, slik at fabrikker kan automatisere enda flere trinn i prosessene sine.
 Er dette fremtidens robot? (NASA)
Er dette fremtidens robot? (NASA) Vi mennesker har ikke utviklet disse systemene ennå. Å oppnå menneskelignende autonom robotferdighet vil holde robotforskere, teknologer og innovatører opptatt i overskuelig fremtid. Det vil ikke bremse den pågående robotikkrevolusjonen i produksjonen, fordi nåværende prosesser fremdeles har mye rom for automatisering for å forbedre sikkerhet, hastighet og kvalitet. Men når vi gjør roboter enda bedre, vil de kunne gi oss en hånd.
Denne artikkelen ble opprinnelig publisert på The Conversation.
Taskin Padir, førsteamanuensis i elektro- og datateknikk, Northeastern University